

Flit Lift: Inside the Dynamic Lifting Mechanism That Makes Vision Pro Feel Weightless
Long VR sessions expose a hard truth: padding and counterweights can only go so far. Flit Lift approaches the problem differently — not by adding foam, but by actively managing vertical load so the Vision Pro feels weightless across minutes and hours. This article is a technical deep dive for engineers, product developers, and integration teams who need to understand how Flit Lift’s dynamic lifting mechanism counterbalances a headset in real time, what engineering trade-offs were chosen, and how to integrate, validate, and maintain it in production systems. ⏱️ 12-min read
Across the next sections we’ll unpack the physics that make the lift feel smooth, the mechanical architecture that keeps motion repeatable, the sensing and control that run the closed-loop system, how Flit Lift synchronizes with GraviPro, practical OEM integration guidance, safety and maintenance considerations, and real-world performance observations. Expect actionable examples, recommended parameters, and a realistic checklist you can use in lab and product development.
What Flit Lift Is and What It Solves
At its core, Flit Lift is a compact dynamic lifting module tailored for the Vision Pro family. Rather than adding passive padding or rigid counterweights, it provides controlled vertical actuation to actively reposition the headset relative to the head. That vertical control shifts the load off the face and onto a balanced cradle at the crown and neck, redistributing forces to reduce facial pressure and neck torque. The result is a perceptible reduction in pressure points and fewer micro-adjustments during intense interactions.
The problem statement is simple but stubborn: a 500–700 g headset concentrates moments at the face and nose bridge, which quickly becomes uncomfortable during long sessions. Passive strategies (foam, straps, counterweights) mitigate symptoms but cannot compensate for dynamic shifts in load when the user turns their head, leans, or stands. Flit Lift solves this by actively tracking and counterbalancing vertical displacement so the headset remains stable and oriented even during quick motions.
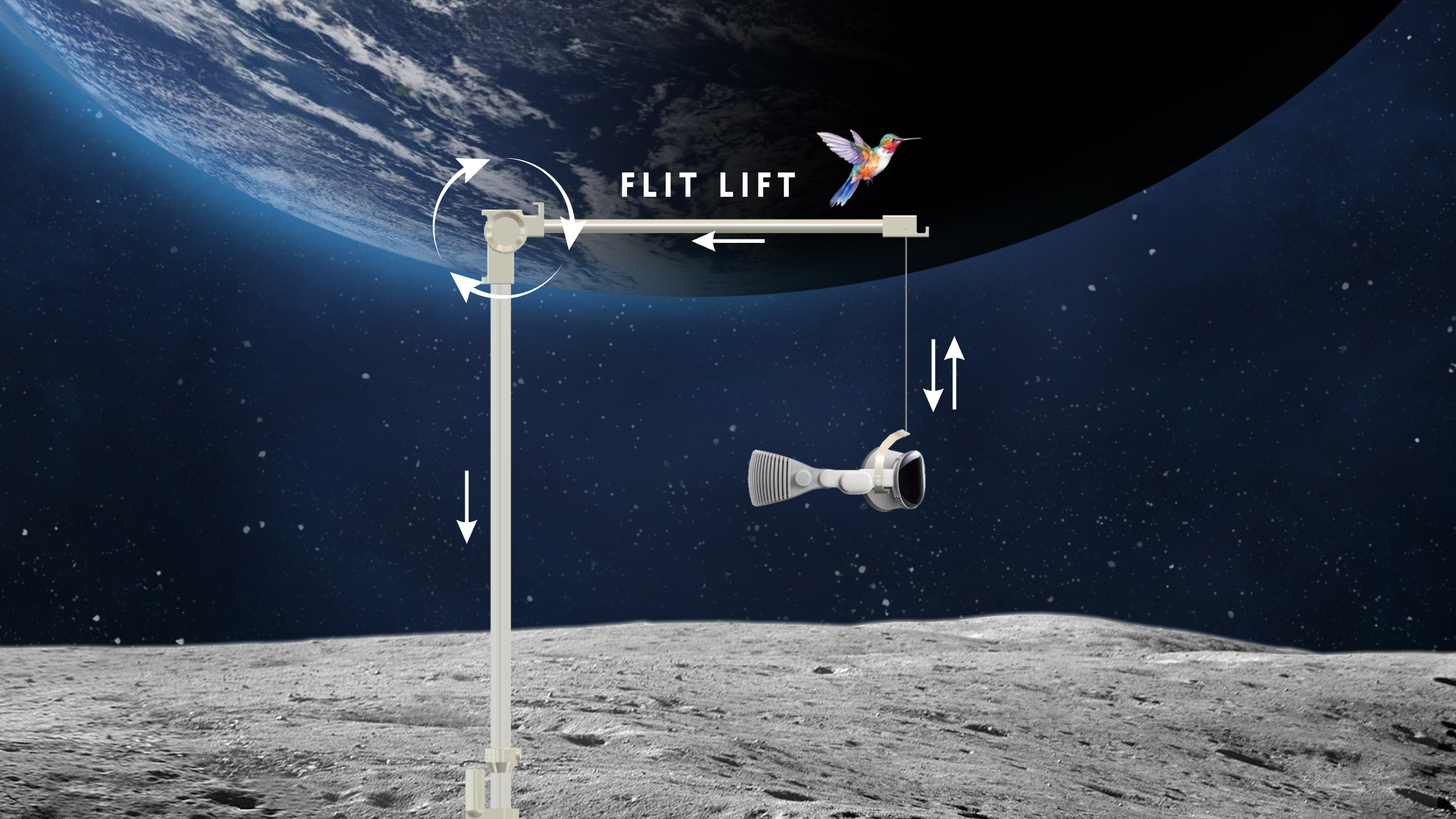
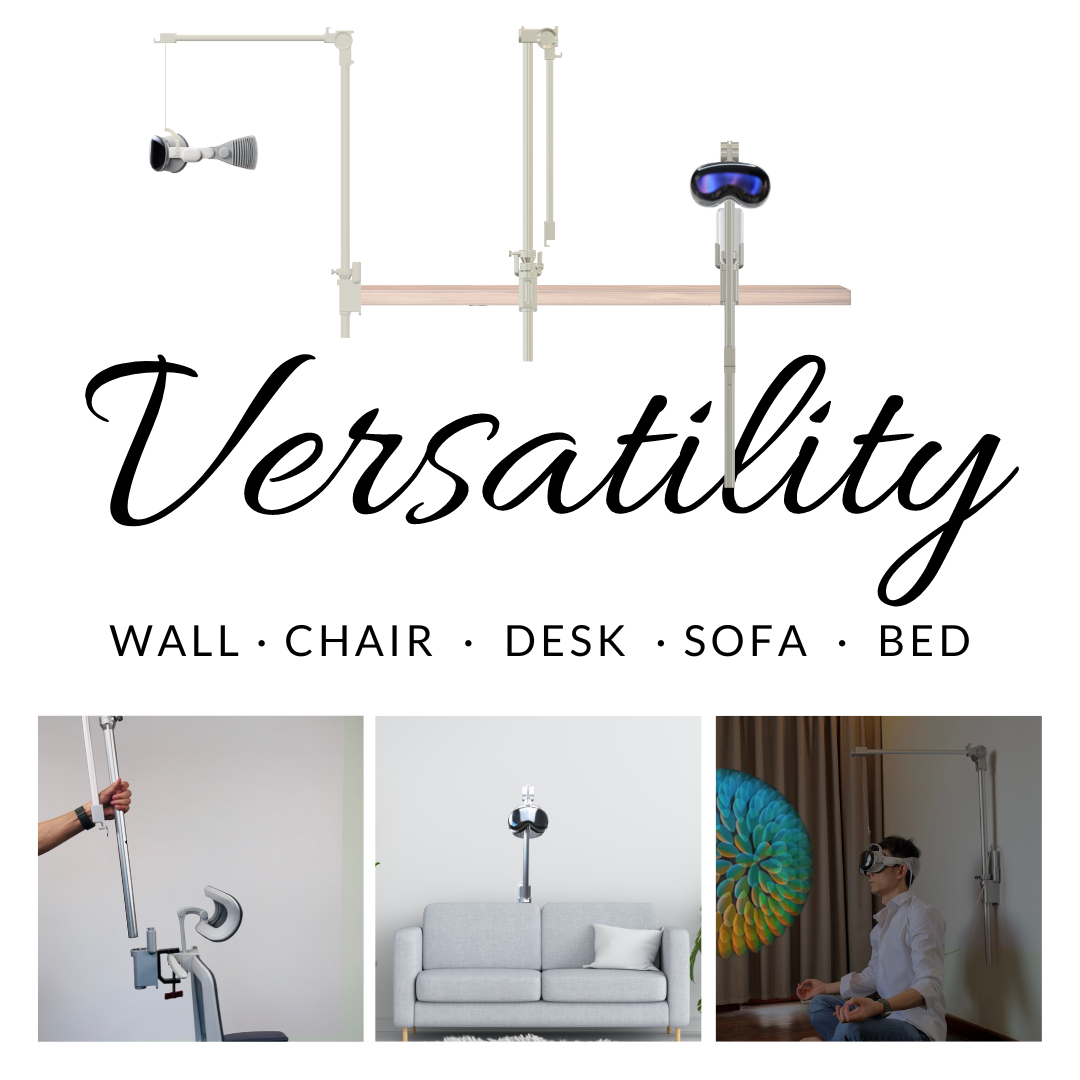
Practically, Flit Lift is a module that integrates with the Vision Pro fit system: a vertical actuator moves a precision-guided carriage that holds the headset. Guided linkages constrain the motion to a repeatable path, preventing tilt or unwanted yaw while enabling sub-millimeter positional control. For labs, arcades, and professional simulators, the module minimizes interruptions for refitting, trimming session setup time and letting users remain immersed longer.
Core Physics of the Dynamic Lifting Mechanism
The Flit Lift design leverages a few physical principles to make active lifting feel natural. First, vertical displacement creates stabilizing moments. As the carriage raises or lowers, the vertical offset shifts the line of action of the headset’s center of mass relative to support points. That offset generates a restoring moment proportional to mass × g × horizontal offset (torque = m·g·d), which helps passively correct small tilts and returns the assembly toward neutral orientation rather than amplifying oscillations.
Second, constrained motion reduces lateral drift. By pinning the carriage to a narrowly defined path using precision rails and guided linkages, the system reduces degrees of freedom that would otherwise let the headset translate sideways. Lateral drift is particularly harmful for perceived stability: even millimeter-level side motions misalign optics and reduce tracking fidelity. Constraining the path keeps the cameras and sensors aligned with the user’s forward view and simplifies sensor fusion.
Third, energy exchange through springs and dampers smooths transitions. A calibrated spring-damper network stores kinetic energy during rapid upward movements and releases it as the system decelerates, while viscous damping dissipates residual energy to prevent overshoot. In control terms, designers tune the effective stiffness and damping to target a critically damped response for typical user-induced perturbations — reducing ringing while keeping settling times short (practical targets: sub-200 ms settling for small step inputs in many implementations).
These physical design choices interact with control software. A well-matched mechanical stiffness lowers controller bandwidth requirements; conversely, overly soft linkages force the controller to work harder, increasing energy use and risk of instability. The goal is an architecture where physics carries much of the stability burden and the control loop provides precision and safety corrections.
Mechanical Architecture and Key Components
The mechanical backbone of Flit Lift is straightforward but engineered for tight tolerances: a lifting carriage rides on parallel precision guide rails and is driven by compact actuators through linkages that preserve headset orientation. Rails are typically hardened steel or stainless shafts with low-friction linear bearings or recirculating roller guides to resist tilt and keep vertical travel repeatable. A welded or machined cross-member ties the rail pair to the frame, and robust end stops prevent over-travel.
The actuator choice depends on trade-offs in size, speed, torque, and control resolution. Many implementations use a small brushless DC (BLDC) motor with a ball screw or planetary gearbox for high positional stiffness and fine resolution; some use servo motors with toothed belts for quieter, lower-profile drives. Linkages commonly use a parallelogram or scissor arrangement to keep the headset’s pitch and roll steady as height changes. Designers size drives for a payload range that comfortably exceeds the Vision Pro’s mass — typical design margin is 2× the expected payload to accommodate accessories and user motion.
Integrated feedback is critical. Linear encoders (optical or magnetic) mounted to the carriage provide sub-millimeter position data. End stops, mechanical limits, and torqued fasteners ensure mechanical safety. The harness interface — crown/neck cradle and shoulder anchors — is adjustable to fit a range of head geometries while maintaining a consistent load path into the carriage. Fasteners are selected to manage cyclic loading and minimize loosening; use of thread-lock and torque specs is standard in OEM kits.
Thermal and EMI engineering are also important, especially when the actuator sits close to the headset. Heat-sinking the actuator assembly and routing power cables away from headset sensors prevents thermal drift and electromagnetic interference. In compact designs, a small microcontroller manages motor drivers, local sensor fusion, and power protections inside the carriage housing.
Sensing, Control, and Real-Time Feedback
Flit Lift’s perceived smoothness stems from a high-quality sensing and control stack. The sensing suite typically comprises three complementary elements: a high-resolution linear encoder for absolute position, a force/load sensor under the gondola to detect vertical load changes, and an inertial measurement unit (IMU) to capture accelerations and angular rates. Together they provide the controller with sub-millimeter positional accuracy, immediate detection of external disturbances, and tilt/oscillation information for stabilization.
On the control side, a tight loop runs at high refresh rates. Practical systems sample the encoder and IMU at kilohertz-class rates (for example, IMU at 1 kHz, encoder at 2 kHz) and compute control outputs at several hundred hertz to a kilohertz depending on actuator bandwidth. The controller blends feedforward commands (based on predicted user motion from head pose) with feedback corrections (PID or model-predictive components). A jerk-minimization policy shapes trajectories to avoid sharp accelerations that users perceive as jolts.
Control algorithms increasingly use model-driven prediction: a short-term motion model forecasts head pose and prepositions the carriage, reducing perceived latency. Latency targets are aggressive — design teams aim for end-to-end input-to-motion latencies under 20 ms where possible — because lower latency preserves the illusion of weightlessness. Health monitoring runs in parallel: sensor diagnostics, encoder drift checks, current monitoring, and bearing friction estimation detect anomalies early and trigger controlled deceleration or safe stops.
Fault handling matters. If a force spike indicates an obstruction, the control stack transitions to a compliant mode, lowering motor current and stopping motion. Watchdog timers supervise processors and sensor pipelines; if data streams stall or drift beyond thresholds, the system logs the event and enters a safe state. Telemetry exports include position traces, load histories, and event logs for post-session analysis and predictive maintenance.
GraviPro Synergy: How It Works with GraviPro
Flit Lift is designed to be more than a standalone accessory — it’s intended to be a cooperative element inside the GraviPro ecosystem. Integration begins with a shared data bus and precise time synchronization. Both systems exchange time-stamped pose data, sensor fusion outputs, and control references so that the world model remains consistent across lift and platform actuators. This synchronization eliminates subtle misalignments that would otherwise manifest as visual drift or perceptible lag during rapid head movements.
From a control architecture standpoint, coordinated loops are essential. The lift controller and GraviPro’s platform attitude actuators run coupled control objectives: the lift tracks vertical displacement and load redistribution while the platform manages gross attitude corrections. They share feedforward predictions (e.g., anticipated head pitch during a turn), safety constraints (soft/hard position limits), and environment data (e.g., user intent from Vision Pro pose). That coordination reduces overshoot and avoids competing actuator actions that would destabilize the headset.
Low-latency deterministic communications are recommended. For lab and enterprise deployments, EtherCAT or CAN-FD are strong choices; they provide predictable transfer times and efficient real-time messaging. Message payloads should include absolute timestamps, pose vectors, and a health flag to allow cross-checking. A small handshake protocol negotiates capabilities — payload mass, permitted travel, and emergency behaviors — so the systems can gracefully degrade if one side approaches its limits.
Finally, interoperability is easier when common calibration routines exist. A start-up handshake between GraviPro and Flit Lift establishes neutral positions and aligns coordinate frames. That handshake can be extended for firmware updates, sensor bias compensation, or adding third-party sensors without rearchitecting the data path. For developers, exposing a clear API for pose fusion and diagnostics speeds adoption and reduces integration friction.
Developer and OEM Integration Guide
Integrating Flit Lift into OEM products or lab rigs requires attention to mechanical alignment, electrical interfaces, and software contracts. Mechanically, the module is shipped with an alignment kit: dowel pins for repeatable placement, torque specs for structural fasteners, and recommended mounting heights to preserve headset clearance during full travel. Install rails on a rigid structure with mechanical tolerances specified in the integration guide (e.g., parallelism within 0.2 mm over the rail span) to maintain repeatability.
Electrically, Flit Lift exposes a clean connectorized interface for power (12–48 VDC, depending on motor choice), a deterministic control bus (EtherCAT/CAN-FD or a documented TCP/UDP with latency bounds for prototyping), and a safety interlock input for E-stop and hardware-enable. Documented EMI and grounding guidelines prevent noise coupling into headset sensors. The accessory includes a safety interlock path that OEMs can wire into facility safety systems, and the wiring harness is routed to avoid abrasion or sharp bends.
The control API offers setpoints (target position and velocity), soft and hard limits, and diagnostic telemetry. Use versioned endpoints and a stable payload schema: provide both human-readable JSON and compact binary packets for high-rate telemetry. Define request rate limits, authentication, and retry behavior so integrators know how to manage the control loop. Sample state diagrams (Idle → Moving → Hold → Fault) and example sequences (calibration, manual override, emergency stop) help developers embed Flit Lift cleanly into broader workflows.
Calibration and validation should start with mechanical checks (alignment, end-stop verification), followed by sensor calibrations (encoder zero, IMU biases, load cell zeroing). Bench tests include position repeatability sweeps (target <0.5 mm RMS for repeatable lifts), latency measurement (round-trip command-to-motor latency target <20 ms), and robustness tests under expected duty cycles. Finally, run user-in-the-loop trials to tune jerk limits and motion profiles for perceived comfort — those subjective trials are critical to finishing the integration.
Safety, Reliability, and Maintenance
Safety is engineered in layers. Mechanical stops and software limits prevent over-travel; motor current limits and torque sensing prevent harmful forces; and an E-stop cuts power to actuators within milliseconds. Critical safety routines log fault events for diagnostics. During initial deployment, verify end-stop alignment, measure torque thresholds at which current limiting engages, and exercise the E-stop a few times to ensure the system transitions cleanly to the safe state without leaving the headset in an unsafe position.
Redundancy reduces single-point failures. Two independent position sensors (for example, an encoder plus an absolute magnetic strip) permit cross-checks. Watchdog timers supervise processors and can force a graceful halt if sensor data is inconsistent. In practice, if the encoder and backup disagree beyond a defined tolerance, the system moves to a compliant hold, reduces current, and alerts operators. This approach prevents actuator motors from fighting mechanical bindings or producing jerky corrective motion.
Maintenance is predictable and discipline-driven. A recommended schedule is quarterly inspections for rail wear, lubrication, cable routing, and fastener torque; and a full service annually that includes bearing replacement, encoder re-certification, and motor end-of-life checks. Keep a maintenance log: recording torque values, friction measurements, and encoder health trends helps preempt failures and informs spare-part planning. Firmware should allow timed reminders and export logs for automated maintenance scheduling.
Design for field serviceability. Use replaceable wear items (carriage bearings, belts, end-stop pads), keep sensor modules modular, and document swap procedures with torque specs and calibration steps. For enterprise deployments, provide a remote diagnostics mode that streams condensed telemetry to support teams so they can triage issues without an expensive site visit.
Performance Benchmarks, Real-World Use, and Adoption
Performance validation blends bench metrics and user trials. Bench targets for a comfort-first lift system typically include position repeatability under 0.5 mm RMS, latency under ~20 ms for command-based repositioning, and a settling time under 200 ms for small step changes. Power efficiency and thermal behavior are also important: designers aim for conservative continuous power use so heat near the headset is negligible during long sessions.
In field trials, Flit Lift-equipped Vision Pro setups show measurable comfort gains. Labs and early deployments report users extending session length by 20–40% before hitting discomfort thresholds, with noticeable reduction in facial pressure and neck fatigue. Users also notice fewer micro-adjustments: reduced tilt and micro-shifts during walking or quick head turns preserve a steadier view and more stable sensor tracking. These gains translate into fewer interruptions in training, smoother experiences in content demos, and higher throughput in shared usage environments.
Adoption is driven by modularity, ease of integration, and an ecosystem mindset. Organizations adopting Flit Lift typically value the API and deterministic bus integration with GraviPro, which shortens the path to reliable, calibrated installations. Roadmap opportunities that attract early adopters include expanding payload capacity for accessory-laden headsets, further reducing mechanical footprint, and improving thermal isolation. As standards for headset accessories emerge, modular solutions that offer clear mechanical and electrical contracts will gain traction faster.
Case studies underline practical value: a university VR lab saw improved posture and longer lab sessions after deploying Flit Lift on fixed rigs; an industrial training center used portable Flit Lift-enabled simulators to rebalance headset load during repetitive tasks, reducing operator strain across shifts. Those deployments emphasize how an actively controlled lift complements, rather than replaces, existing ergonomic practices.
Next step for integrators: request the Flit Lift developer kit, run the baseline bench tests in your lab (repeatability, latency, thermal), and schedule user-in-loop trials to tune jerk and feedforward parameters. A simple integration checklist — mechanical alignment, electrical connection, API handshake, calibration run, safety validation — will get you from kit to validated deployment quickly.
— By a Senior VR Hardware Writer and Systems Engineer. If you’re planning an integration, ask for the integration package (mechanical drawings, wiring diagrams, API spec) and an SDK-enabled demo to evaluate behavior on your hardware before field deployment.




Share:
GraviPro VR Comfort Versus Standard Headsets A Practical Comparison
GraviPro compatibility guide: pairing gravity-assisted VR gear with major headsets